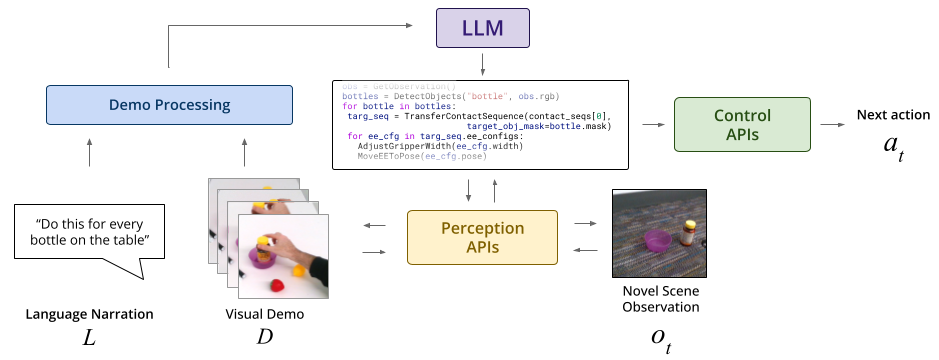
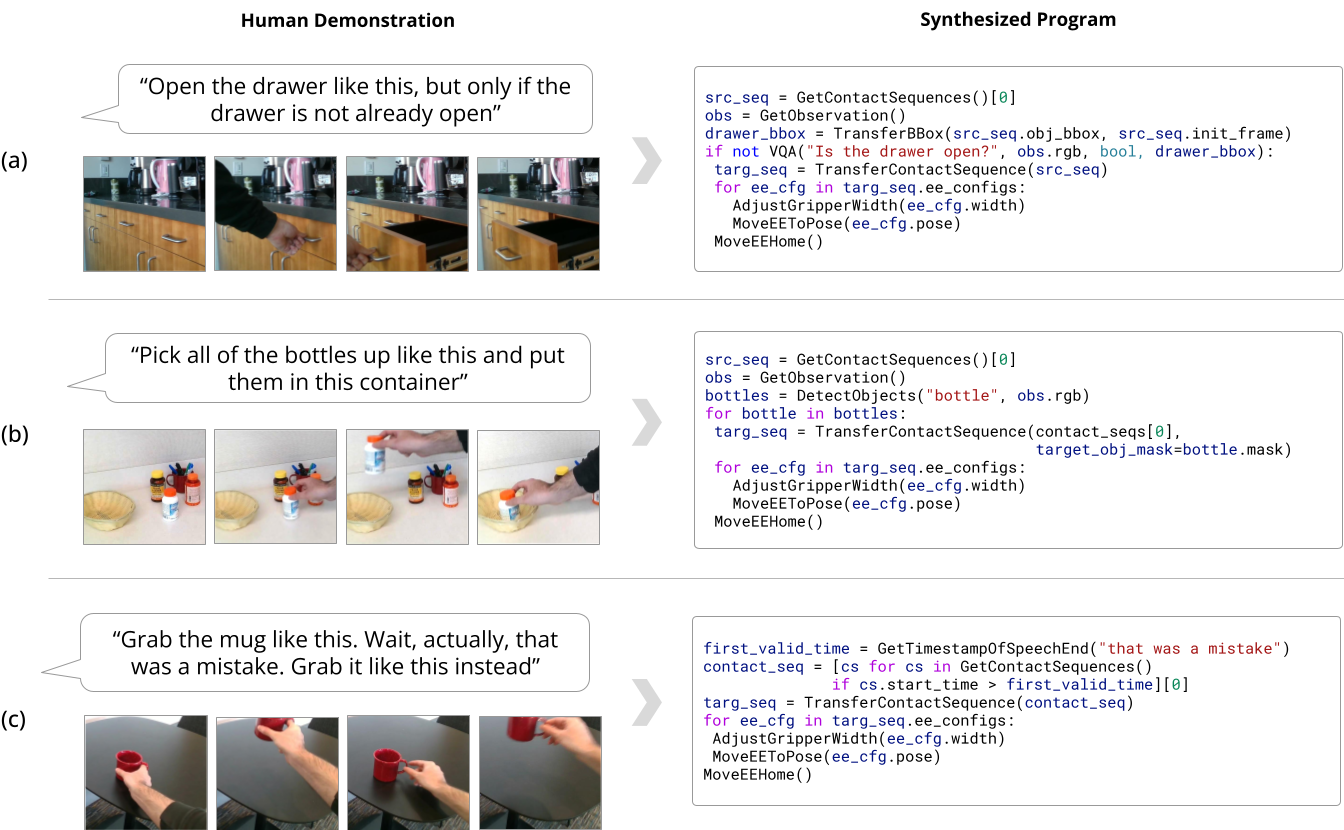
We introduce a modular, neuro-symbolic framework for teaching robots new skills through language and visual demonstration. Our approach, ShowTell, composes a mixture of foundation models to synthesize robot manipulation programs that are easy to interpret and generalize across a wide range of tasks and environments. ShowTell is designed to handle complex demonstrations involving high level logic such as loops and conditionals while being intuitive and natural for end-users. We validate this approach through a series of real-world robot experiments, showing that ShowTell out-performs a state-of-the-art baseline based on GPT4-V, on a variety of tasks, and that it is able to generalize to unseen environments and within category objects.